Robotica
Il tatto dei Robot potrebbe essere veloce quanto quello umano
Tempo di lettura: < 1 minuto. Un sistema tattile artificiale sviluppato dall’Università di Uppsala permette ai robot di percepire il tatto con la rapidità degli umani.

Un sistema artificiale sviluppato dai ricercatori dell’Università di Uppsala potrebbe permettere ai robot di percepire il tatto con la stessa rapidità degli esseri umani. Questo sistema, ispirato dalla neuroscienza, utilizza impulsi elettrici per processare le informazioni tattili dinamiche nello stesso modo del sistema nervoso umano.
Componenti del sistema tattile artificiale
Il sistema ha tre componenti principali:
- Pelle Elettronica (e-skin): Dotata di sensori che possono rilevare la pressione al tatto.
- Neuroni Artificiali: Convertono i segnali tattili analogici in impulsi elettrici.
- Processore: Elabora i segnali e identifica l’oggetto.
I test hanno coinvolto 22 oggetti diversi per la presa e 16 superfici diverse per il tocco.
Applicazioni e prospettive future
- Protesi: Una mano protesica con questa tecnologia potrebbe sentirsi come parte del corpo del portatore.
- Interazioni Umano-Robot: Le interazioni diventerebbero più sicure e naturali grazie al feedback tattile.
- Monitoraggio Medico: Potrebbe essere utilizzata per monitorare disfunzioni motorie causate da malattie come il Parkinson e l’Alzheimer, o per aiutare i pazienti a recuperare funzionalità perse dopo un ictus.
Obiettivi futuri
I ricercatori stanno anche esplorando la possibilità di sviluppare il sistema in modo che possa percepire dolore e calore, nonché distinguere i materiali, ad esempio legno o metallo. Un altro obiettivo è produrre pelle artificiale per un intero robot, con un numero sufficiente di recettori per permettere una destrezza simile a quella della mano umana.
Finanziamenti e collaborazioni
La ricerca è stata finanziata dal programma di ricerca e innovazione Horizon 2020 dell’Unione Europea, il Consiglio delle Ricerche Svedese, la Fondazione Svedese per la Ricerca Strategica, il programma di ricerca eSSENCE (Svezia), AI4Research (Università di Uppsala), la Fondazione Margaretha af Ugglas e l’infrastruttura nazionale per il supercalcolo in Svezia presso UPPMAX.












Robotica
Robot molecolari Autoassemblanti e Autodissocianti: innovazione nella nanotecnologia
Tempo di lettura: 2 minuti. I ricercatori di Tohoku e Kyoto sviluppano un controllore molecolare a DNA per robot molecolari autoassemblanti, avanzando nella nanotecnologia.
I ricercatori delle università di Tohoku e Kyoto hanno sviluppato con successo un controllore molecolare a base di DNA che dirige autonomamente l’assemblaggio e la disassemblaggio di robot molecolari. Questa tecnologia pionieristica rappresenta un significativo passo avanti verso sistemi molecolari autonomi avanzati, con potenziali applicazioni in medicina e nanotecnologia.
Controllo Autonomo dei Robot Molecolari
Il nuovo controllore molecolare, composto da molecole di DNA artificialmente progettate e da enzimi, coesiste con i robot molecolari e li controlla emettendo specifiche molecole di DNA. Questo permette ai robot molecolari di autoassemblarsi e autodissociarsi automaticamente, senza bisogno di manipolazione esterna. Questa operazione autonoma è cruciale poiché consente ai robot molecolari di svolgere compiti in ambienti dove i segnali esterni non possono arrivare.

La ricerca, guidata dal professor Shin-ichiro M. Nomura della Graduate School of Engineering dell’Università di Tohoku e dal professor Ibuki Kawamata della Graduate School of Science dell’Università di Kyoto, ha coinvolto anche Kohei Nishiyama e Akira Kakugo. La precedente ricerca di Kakugo e colleghi aveva sviluppato robot molecolari di tipo swarm che si muovono individualmente, assemblandosi e disassemblandosi tramite manipolazione esterna. Tuttavia, grazie al nuovo controllore molecolare, i robot possono autoassemblarsi e autodissociarsi secondo una sequenza programmata.
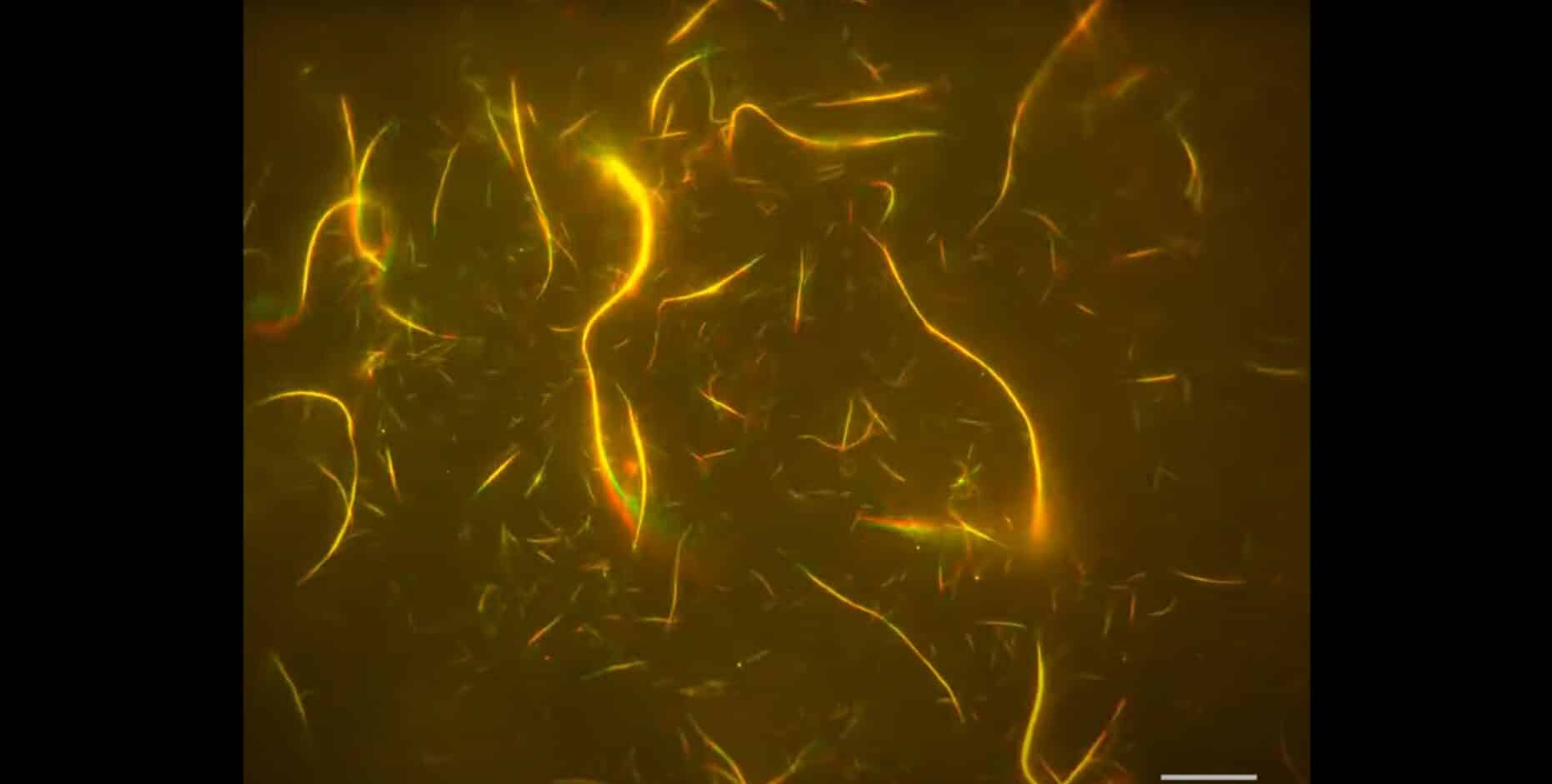
Funzionamento del Controllore Molecolare

Il controllore molecolare avvia il processo emettendo un segnale di DNA specifico equivalente al comando “assembrati”. I microtubuli nella stessa soluzione, modificati con DNA e spinti da motori molecolari kinesinici, ricevono il segnale di DNA, allineano la loro direzione di movimento e si assemblano automaticamente in una struttura raggruppata. Successivamente, il controllore emette un segnale di “disassemblaggio”, causando la disassemblaggio automatico dei fasci di microtubuli. Questo cambiamento dinamico è stato ottenuto attraverso un controllo preciso del circuito molecolare, che funziona come un sofisticato processore di segnali.
Implicazioni future
L’avanzamento di questa tecnologia contribuirà allo sviluppo di sistemi molecolari autonomi più complessi e avanzati. I robot molecolari potranno svolgere compiti che non possono essere compiuti da soli, assemblandosi secondo i comandi e poi disperdendosi per esplorare obiettivi. Inoltre, questa ricerca ha ampliato le condizioni di attività dei robot molecolari integrando diversi gruppi molecolari, come il sistema di circuiti DNA e il sistema operativo delle proteine motrici.
Secondo Nomura, combinando il controllore molecolare con circuiti DNA sempre più sofisticati e precisi, dispositivi di amplificazione delle informazioni molecolari e tecnologie di progettazione biomolecolare, si prevede che i robot molecolari di tipo swarm elaboreranno automaticamente una gamma più diversificata di informazioni biomolecolari. Questo progresso potrebbe portare alla realizzazione di tecnologie innovative nella nanotecnologia e nel campo medico, come nanomacchine per il riconoscimento molecolare in situ e la diagnosi o sistemi intelligenti di somministrazione di farmaci.
I dettagli della scoperta sono stati pubblicati sulla rivista Science Advances il 31 maggio 2024.
Robotica
LLM usati per aiutare i robot nella navigazione
Tempo di lettura: 2 minuti. Il MIT utilizza grandi modelli linguistici per migliorare la navigazione dei robot, superando le limitazioni dei metodi visivi tradizionali.
La recente ricerca condotta dal MIT, in collaborazione con il MIT-IBM Watson AI Lab, esplora una metodologia innovativa per migliorare la navigazione dei robot utilizzando i grandi modelli linguistici (LLM). Questo approccio mira a superare le limitazioni delle tecniche tradizionali basate su rappresentazioni visive, che richiedono grandi quantità di dati visivi e un notevole sforzo umano per la costruzione dei modelli.
Soluzione a un problema di visione con il linguaggio
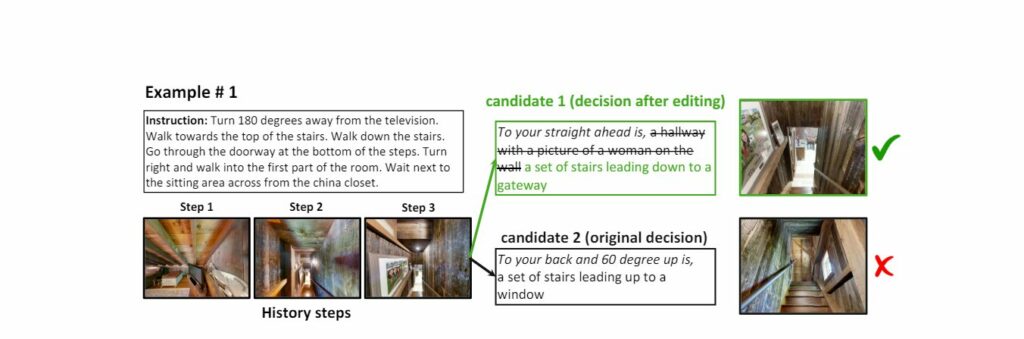
Gli attuali approcci alla navigazione dei robot utilizzano molteplici modelli di machine learning, ognuno specializzato in una parte del compito. Questi metodi necessitano di grandi quantità di dati visivi, spesso difficili da ottenere. I ricercatori del MIT hanno ideato una soluzione che converte le rappresentazioni visive in descrizioni testuali, che vengono poi elaborate da un grande modello linguistico per determinare le azioni che il robot deve compiere.
Il metodo proposto sfrutta modelli di captioning per ottenere descrizioni testuali delle osservazioni visive del robot. Queste descrizioni vengono combinate con le istruzioni linguistiche dell’utente e inserite in un modello linguistico, che decide il passo successivo per la navigazione. Questo approccio permette di generare rapidamente una grande quantità di dati di addestramento sintetici, utilizzando meno risorse computazionali rispetto alle tecniche basate su immagini complesse.
Vantaggi dell’utilizzo del linguaggio
Nonostante il metodo non superi le tecniche basate sulla visione in termini di prestazioni, presenta diversi vantaggi. La generazione di dati testuali richiede meno risorse computazionali, permettendo di creare rapidamente grandi quantità di dati di addestramento sintetici. Inoltre, il linguaggio può colmare il divario tra gli ambienti simulati e il mondo reale, dove le immagini generate al computer possono differire significativamente dalle scene reali.
Le rappresentazioni testuali sono più comprensibili per gli esseri umani, facilitando l’identificazione dei punti di fallimento del robot. Questo metodo può essere applicato a una varietà di compiti e ambienti, poiché utilizza un unico tipo di input: il linguaggio. Tuttavia, un limite di questa metodologia è la perdita di informazioni che sarebbero catturate da modelli basati sulla visione, come le informazioni sulla profondità.
Prospettive future
I ricercatori intendono esplorare ulteriormente la combinazione delle rappresentazioni basate sul linguaggio con i metodi basati sulla visione, che ha mostrato miglioramenti nelle capacità di navigazione dei robot. Un’area di interesse futuro è lo sviluppo di un modello di captioning orientato alla navigazione per migliorare ulteriormente le prestazioni. Inoltre, si vuole indagare la capacità dei grandi modelli linguistici di mostrare consapevolezza spaziale e come ciò possa supportare la navigazione basata sul linguaggio.
Questa ricerca, supportata dal MIT-IBM Watson AI Lab, rappresenta un passo significativo verso l’integrazione di tecniche linguistiche e visive per migliorare la navigazione dei robot, rendendola più efficiente e comprensibile grazie agli LLM.
Robotica
Grazie a un ratto virtuale renderemo i robot più agili?
Tempo di lettura: 2 minuti. Neuroscienziati di Harvard e Google DeepMind hanno creato un ratto virtuale per studiare il controllo del movimento cerebrale, con applicazioni nella robotica.

L’agilità con cui umani e animali si muovono è un miracolo evolutivo che nessun robot è ancora riuscito a emulare perfettamente e, per esplorare il mistero di come il cervello controlla e coordina questi movimenti, neuroscienziati di Harvard hanno creato un ratto virtuale con un cervello artificiale capace di muoversi come un vero roditore.
Il progetto del ratto virtuale
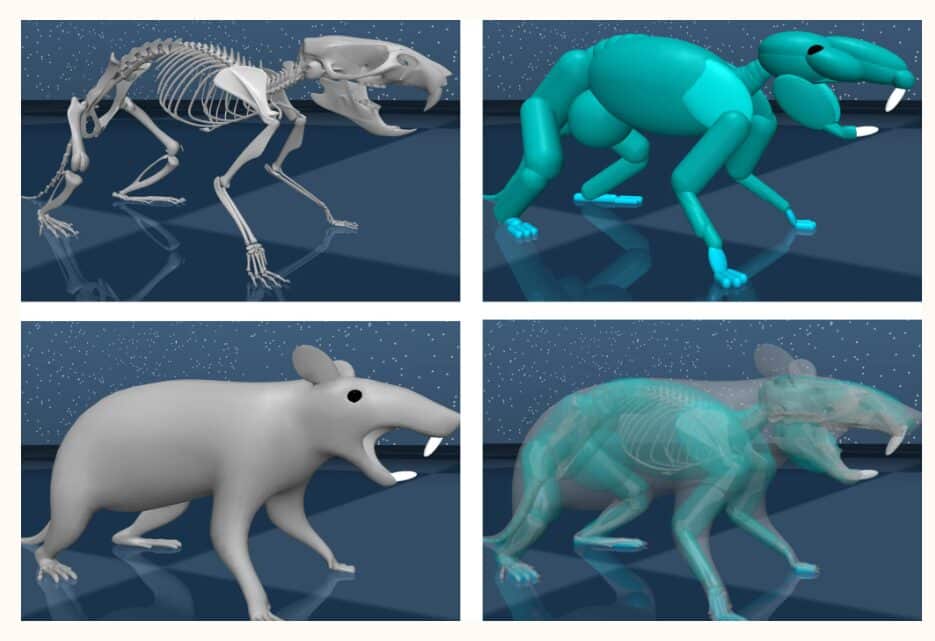
Bence Ölveczky, professore nel Dipartimento di Biologia Organismica ed Evolutiva, ha guidato un gruppo di ricercatori in collaborazione con gli scienziati del laboratorio AI DeepMind di Google per costruire un modello digitale biomeccanicamente realistico di un ratto. Utilizzando dati ad alta risoluzione registrati da ratti reali, hanno addestrato una rete neurale artificiale – il “cervello” del ratto virtuale – a controllare il corpo virtuale in un simulatore fisico chiamato MuJoco, dove sono presenti gravità e altre forze. I risultati sono promettenti.
Risultati promettenti
I ricercatori di Harvard e Google hanno scoperto che le attivazioni nella rete di controllo virtuale prevedevano accuratamente l’attività neurale misurata dai cervelli di ratti reali che producevano gli stessi comportamenti. Questo rappresenta un nuovo approccio per studiare come il cervello controlla il movimento, sfruttando i progressi nel deep reinforcement learning e nell’AI, così come il tracciamento 3D dei movimenti negli animali che si comportano liberamente.
Collaborazione fruttuosa
“La collaborazione è stata fantastica,” ha detto Ölveczky. “DeepMind aveva sviluppato una pipeline per addestrare agenti biomeccanici a muoversi in ambienti complessi. Non avevamo le risorse per eseguire simulazioni del genere e addestrare queste reti.” Lavorare con i ricercatori di Harvard è stata “un’opportunità davvero entusiasmante,” ha detto Matthew Botvinick, co-autore e Senior Director of Research di Google DeepMind.
Applicazioni nel controllo robotico
Questi simulazioni potrebbero avviare una nuova area di neuroscienze virtuali in cui animali simulati con AI, addestrati a comportarsi come quelli reali, offrono modelli trasparenti per studiare i circuiti neurali e come tali circuiti sono compromessi nelle malattie. Mentre il laboratorio di Ölveczky è interessato a domande fondamentali su come funziona il cervello, la piattaforma potrebbe essere utilizzata, ad esempio, per progettare migliori sistemi di controllo robotico.
Passi futuri
Il prossimo passo potrebbe essere quello di dare all’animale virtuale l’autonomia di risolvere compiti simili a quelli incontrati dai ratti reali. “Dai nostri esperimenti, abbiamo molte idee su come tali compiti sono risolti e come gli algoritmi di apprendimento che sottendono l’acquisizione di abilità sono implementati,” ha continuato Ölveczky. “Vogliamo iniziare a usare i ratti virtuali per testare queste idee e aiutare ad avanzare la nostra comprensione di come i cervelli reali generano comportamenti complessi.”




ChatGPT-4: sfrutta l’87% delle vulnerabilità One-Day
Tempo di lettura: 2 minuti. ChatGPT-4 è in grado di sfruttare l'87% delle vulnerabilità one-day, sollevando preoccupazioni per la sicurezza...


Supply Chain compromessa con installer Notezilla, RecentX e Copywhiz
Tempo di lettura: 2 minuti. La compromissione della supply chain ha portato alla distribuzione di installer trojanizzati per Notezilla, RecentX...


Vulnerabilità Regresshion in OpenSSH: RCE e Root su server Linux
Tempo di lettura: 2 minuti. La vulnerabilità regreSSHion in OpenSSH permette l'esecuzione di codice remoto non autenticato con privilegi di...


Repository node-ip in GitHub è in “Sola Lettura”: CVE Contestato
Tempo di lettura: 2 minuti. Sviluppatore archivia il repository GitHub di "node-ip" in risposta a una CVE contestata, sollevando preoccupazioni...


La sicurezza della memoria nei progetti Open Source critici
Tempo di lettura: 2 minuti. Rapporto congiunto di CISA, FBI, ASD e CCCS sulla sicurezza della memoria nei progetti open...


Attacco di iniezione di Prompt: esecuzione di Codice in Vanna.AI
Tempo di lettura: 2 minuti. Scopri la vulnerabilità di iniezione di prompt in Vanna.AI (CVE-2024-5565) che consente l'esecuzione di codice...


Generazione di dati di rete sintetici e privacy-preserving con AI per NIDS
Tempo di lettura: 2 minuti. Generazione di tracce di traffico sintetiche e privacy-preserving con modelli AI per l'addestramento dei NIDS:...


SneakyChef: il gruppo di Cyber Spionaggio dietro SugarGh0st
Tempo di lettura: 3 minuti. SneakyChef espande l'uso di SugarGh0st in attacchi mirati a livello globale come riportato nell'analisi di...


Campagna di malvertising porta all’esecuzione della backdoor Oyster
Tempo di lettura: 2 minuti. Rapid7 scopre campagna malvertising che distribuisce backdoor Oyster, utilizzando installatori malevoli di software come Microsoft...


Meta: registrazione video sui Ray-Ban estesa a 3 minuti, ma attenzione alle pubblicità
Tempo di lettura: 2 minuti. Meta estende il limite di registrazione video sugli occhiali Ray-Ban Meta a 3 minuti: attenzione...


FBI legge Matrice Digitale? Avviso sulle truffe di lavoro Online
Tempo di lettura: 2 minuti. L'FBI segnala un aumento delle truffe lavoro da casa con pagamenti in criptovaluta, offrendo consigli...


Milano: operazione “Trust”, frodi informatiche e riciclaggio di criptovaluta
Tempo di lettura: 2 minuti. Scoperta un'organizzazione criminale transnazionale specializzata in frodi informatiche e riciclaggio di criptovaluta nell'operazione "Trust"


Truffa lavoro Online: analisi metodo Mazarsiu e consigli
Tempo di lettura: 4 minuti. Mazarsiu e Temunao sono solo due portali di arrivo della truffa di lavoro online che...


Mazarsiu e Temunao: non solo truffa, ma un vero metodo
Tempo di lettura: 4 minuti. Le inchieste su Temunao e Marasiu hanno attivato tante segnalazioni alla redazione di persone che...


Pharmapiuit.com : sito truffa online dal 2023
Tempo di lettura: 2 minuti. Pharmapiuit.com è l'ultimo sito truffa ancora online di una serie di portali che promettono forti...


Temunao.Top: altro sito truffa che promette lavoro OnLine
Tempo di lettura: 2 minuti. Temunao.top è l'ennesimo sito web truffa che promette un premio finale a coloro che effettuano...


Attenti a Mazarsiu.com : offerta lavoro truffa da piattaforma Adecco
Tempo di lettura: 2 minuti. Dalla piattaforma Adecco ad un sito che offre lavoro attraverso le Google Ads: è la...


BogusBazaar falsi e-commerce usati per una truffa da 50 milioni
Tempo di lettura: 2 minuti. Oltre 850,000 persone sono state ingannate da una rete di 75,000 falsi negozi online, con...


Truffatori austriaci scappano dagli investitori, ma non dalla legge
Tempo di lettura: 2 minuti. Le forze dell'ordine hanno smascherato e arrestato un gruppo di truffatori austriaci dietro una frode...


Truffa dei buoni SHEIN da 300 euro, scopri come proteggerti
Tempo di lettura: < 1 minuto. La truffa dei buoni SHEIN da 300 euro sta facendo nuovamente vittime in Italia,...


Realme GT 7 Pro: specifiche chiave e anticipazioni
Tempo di lettura: 2 minuti. Realme GT 7 Pro specifiche chiave rivelate: display 1.5K, Snapdragon 8 Gen 4, fotocamera da...


AnTuTu: migliori smartphone di Giugno 2024
Tempo di lettura: 3 minuti. AnTuTu svela le classifiche dei migliori smartphone di giugno 2024: Asus ROG Phone 8 Pro,...


Xiaomi 15: prime specifiche niente male
Tempo di lettura: 2 minuti. Xiaomi 15 ecco le prime specifiche: Snapdragon 8 Gen 4, schermo 1.5K, fotocamera da 50MP,...


EndeavourOS festeggia cinque anni con ARM e Plasma 6.1
Tempo di lettura: 2 minuti. EndeavourOS celebra il quinto anniversario con il ritorno di ARM e il rilascio della versione...


Motorola Edge 50: specifiche e dettagli dalle certificazioni
Tempo di lettura: 2 minuti. Motorola Edge 50: specifiche e dettagli dalle certificazioni


Motorola Razr Plus 2024 vs Samsung Galaxy Z Flip 5: chi vince?
Tempo di lettura: 3 minuti. Confronto completo tra Motorola Razr Plus 2024 e Samsung Galaxy Z Flip 5: design, prestazioni,...


Galaxy Tab S10 solo varianti Plus e Ultra: lancio in arrivo
Tempo di lettura: 2 minuti. Lancio del Samsung Galaxy Tab S10: solo varianti Plus e Ultra, display AMOLED più grandi...


iPhone 16 Pro e Pixel 9: schermo migliore del Galaxy S24 Ultra?
Tempo di lettura: 2 minuti. iPhone 16 Pro e Pixel 9 utilizzeranno la tecnologia schermo OLED M14, superando il Galaxy...


Galaxy Ring e Samsung Health: ecco le innovazioni per la salute
Tempo di lettura: 3 minuti. Samsung Galaxy Ring e nuove funzionalità Samsung Health: innovazioni nel monitoraggio della salute e gestione...


Vivo Watch 3: pronta al lancio globale con nuove specifiche
Tempo di lettura: 2 minuti. Vivo si prepara a lanciare la variante globale del suo orologio intelligente, il Vivo Watch...
 Smartphone1 settimana fa
Smartphone1 settimana faHonor 200 Pro vs. Google Pixel 8 Pro: quale scegliere?
- Smartphone1 settimana fa
Realme GT 6 vs POCO F6: quale scegliere?
- Smartphone1 settimana fa
Galaxy A42 5G, S20 FE e A52s si aggiornano: One UI 6.1.1 arriva presto
- Smartphone1 settimana fa
Samsung dice addio a A51, A41 e M01: resiste l’S21 Ultra
- Tech1 settimana fa
Prezzi di Samsung Galaxy Buds 3, Watch 7 e Watch Ultra Online. Sono dolori
- Tech1 settimana fa
Prezzo del Galaxy Z Flip 6 in Europa, novità Watch e One UI 7
- Smartphone1 settimana fa
OnePlus Ace 3 Pro: oltre 230.000 Pre-Ordini in Cina
- Sicurezza Informatica6 giorni fa
Samsung Galaxy S24 batte in Europa le spedizioni dell’S23















