Robotica
MAMA BEAR: novità Stampa 3D e nell’apprendimento automatico
Tempo di lettura: 2 minuti. Un robot autonomo presso la Boston University crea forme innovative per l’assorbimento di energia, migliorando la sicurezza di caschi e imballaggi

Un robot autonomo, MAMA BEAR, presso il College of Engineering della Boston University ha creato una forma assorbente di energia che nessun umano avrebbe mai potuto ideare. Questa innovazione ha implicazioni significative per la progettazione di caschi più sicuri, imballaggi, paraurti per auto e molto altro.
L’Innovazione di MAMA BEAR
All’interno di un laboratorio della Boston University, un braccio robotico, chiamato MAMA BEAR (Mechanics of Additively Manufactured Architectures Bayesian Experimental Autonomous Researcher), esegue esperimenti autonomi per creare strutture di plastica stampate in 3D. Queste strutture sono progettate per assorbire l’energia in modo efficiente quando vengono schiacciate. MAMA BEAR utilizza un algoritmo di ottimizzazione bayesiana per migliorare progressivamente i design delle strutture basandosi sui risultati di migliaia di esperimenti precedenti.
Processo di esperimento
Il robot stampa una piccola struttura di plastica, ne registra la forma e la dimensione, e poi la schiaccia con una pressione equivalente al peso di un cavallo adulto che si appoggia su una moneta da 25 centesimi. Dopo aver misurato quanta energia la struttura ha assorbito e come la sua forma è cambiata, il robot registra tutti i dettagli in un vasto database. Ogni nuova struttura è leggermente diversa dalla precedente, con design e dimensioni modificati dall’algoritmo del robot.
Risultati rilevanti
- Efficienza Energetica: Prima di MAMA BEAR, la struttura migliore osservata aveva un’efficienza del 71% nell’assorbimento dell’energia. Nel gennaio 2023, il robot ha raggiunto un’efficienza del 75%, stabilendo un nuovo record.
- Applicazioni: Le strutture create da MAMA BEAR hanno un vasto potenziale, inclusi l’imbottitura per caschi, imballaggi per elettronica delicata, ginocchiere e protezioni per polsi per atleti. Attualmente, i dati raccolti vengono utilizzati per progettare nuovi inserti per caschi per i soldati dell’esercito statunitense.
Collaborazioni e Futuri Sviluppi
Il laboratorio KABlab della BU, guidato dal professore associato di ingegneria meccanica Keith Brown, continua a collaborare con altre istituzioni e ricercatori per espandere l’uso della ricerca autonoma. Il team sta anche esplorando modi per riciclare i materiali delle strutture schiacciate, riutilizzandoli per ulteriori esperimenti.
L’importanza della Ricerca Autonoma
La ricerca autonoma, come quella eseguita da MAMA BEAR, consente di condurre esperimenti in modo più rapido ed efficiente rispetto ai metodi tradizionali. Questo approccio non solo accelera il processo di scoperta, ma permette anche di raggiungere risultati che sarebbero stati troppo costosi e lunghi da ottenere con metodi convenzionali.











Robotica
Microrobot magnetico nel trattamento dell’infertilità femminile
Tempo di lettura: 2 minuti. Microrobot magnetico per l’infertilità: una soluzione meno invasiva per trattare le ostruzioni delle tube di Falloppio con precisione e sicurezza.
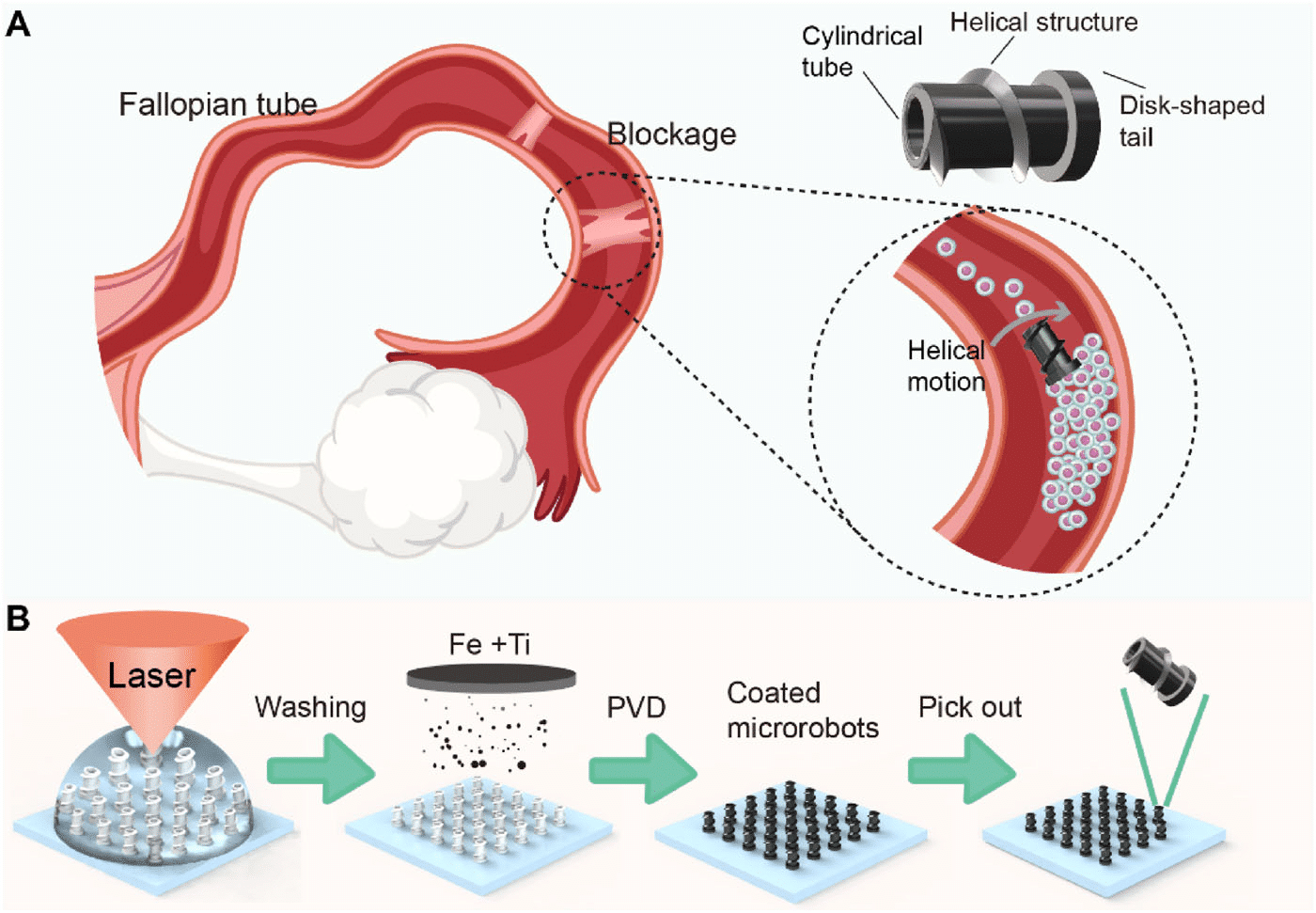
Il laboratorio SIAT Magnetic Soft Microrobots Lab ha sviluppato un’innovativa soluzione per trattare le ostruzioni delle tube di Falloppio, una delle principali cause di infertilità femminile, con microrobot. Questo approccio si basa su microscopici robot magnetici, progettati per rimuovere i blocchi tubarici con precisione e minimizzare l’invasività delle procedure tradizionali.
Come funziona il microrobot magnetico
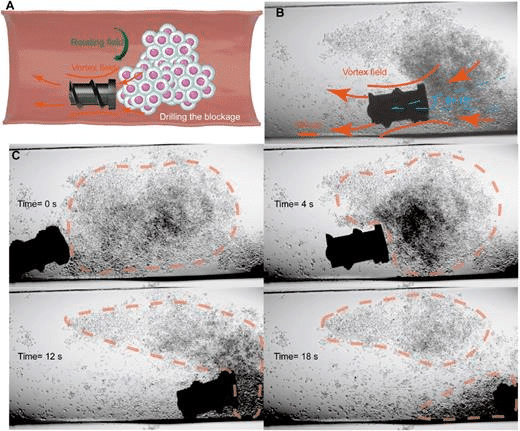
Il dispositivo, descritto nello studio pubblicato su AIP Advances, utilizza una struttura a vite elicoidale con un corpo centrale cilindrico e una coda a forma di disco. Queste caratteristiche lo rendono altamente manovrabile attraverso canali stretti, come quelli che simulano le tube di Falloppio.
Realizzato in resina fotosensibile rivestita con uno strato sottile di ferro, il microrobot acquisisce proprietà magnetiche che gli consentono di essere controllato tramite un campo magnetico esterno. Quando il campo viene attivato, il robot ruota generando un movimento traslatorio. Questo consente al robot di navigare con precisione e di rimuovere ostruzioni, come cluster di cellule, frammentandole e spingendo i detriti verso la coda del dispositivo tramite un campo vorticoso.
Efficienza e risultati dei test
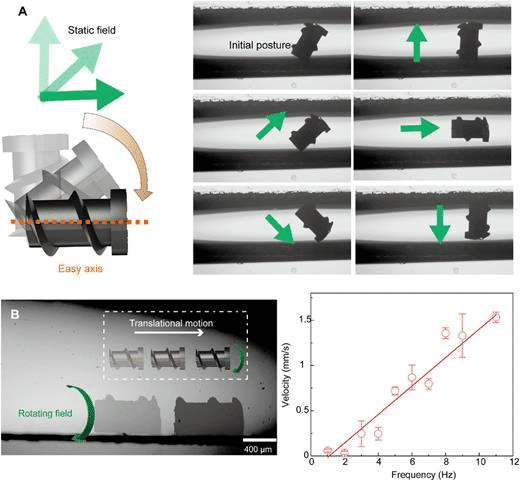
In laboratorio, il microrobot è stato testato in un canale di vetro che simula una tuba di Falloppio ostruita. Durante l’esperimento, ha dimostrato di essere efficace nel rimuovere blocchi simulati, evidenziando un elevato livello di precisione e stabilità del movimento.
Questa tecnologia rappresenta un’alternativa meno invasiva rispetto alle procedure tradizionali, che utilizzano cateteri e guide metalliche per rimuovere le ostruzioni. Inoltre, il design a vite elicoidale e la capacità di navigazione precisa lo rendono adatto per operare in strutture anatomiche delicate.
Prospettive future
Il team di ricerca sta lavorando per ridurre ulteriormente le dimensioni del microrobot, migliorandone l’efficienza e integrando sistemi di imaging in tempo reale per monitorarne i movimenti durante le procedure mediche. Inoltre, i ricercatori stanno esplorando applicazioni chirurgiche più ampie, che includono l’automazione del controllo e l’uso del microrobot in altre procedure minimamente invasive.
Secondo il responsabile dello studio, Haifeng Xu, l’obiettivo a lungo termine è fornire soluzioni meno invasive e più efficaci per trattare l’infertilità e altre patologie, migliorando significativamente la qualità della vita dei pazienti con l’uso di microrobot.
Il microrobot magnetico rappresenta una rivoluzione nel trattamento dell’infertilità, offrendo un approccio innovativo per affrontare le ostruzioni delle tube di Falloppio. Questa tecnologia apre la strada a nuovi orizzonti per la medicina minimamente invasiva, con potenziali applicazioni in molteplici ambiti chirurgici.
Robotica
Materiali intelligenti: il futuro delle reti neurali meccaniche
Tempo di lettura: 2 minuti. Le reti neurali meccaniche dell’Università del Michigan promettono materiali capaci di apprendere e adattarsi: innovazioni che cambiano il futuro della tecnologia.
L’idea che i materiali possano apprendere e risolvere problemi sembra provenire da un racconto di fantascienza, ma i ricercatori dell’Università del Michigan stanno trasformando questa visione in realtà. Grazie a un algoritmo di backpropagation adattato ai materiali fisici, le reti neurali meccaniche (MNN) possono ora apprendere e rispondere a stimoli in modo autonomo. Questo progresso apre nuove prospettive in campi come l’ingegneria aerospaziale, la diagnostica medica e il design intelligente.
Le reti neurali meccaniche: come funzionano
Le MNN sono strutture fisiche, come reticoli di gomma 3D, progettate per rispondere a input meccanici in modo intelligente. A differenza dei tradizionali sistemi digitali, queste reti utilizzano forze fisiche, come il peso applicato su un materiale, per elaborare informazioni. Il risultato è una deformazione visibile che rappresenta l’output.
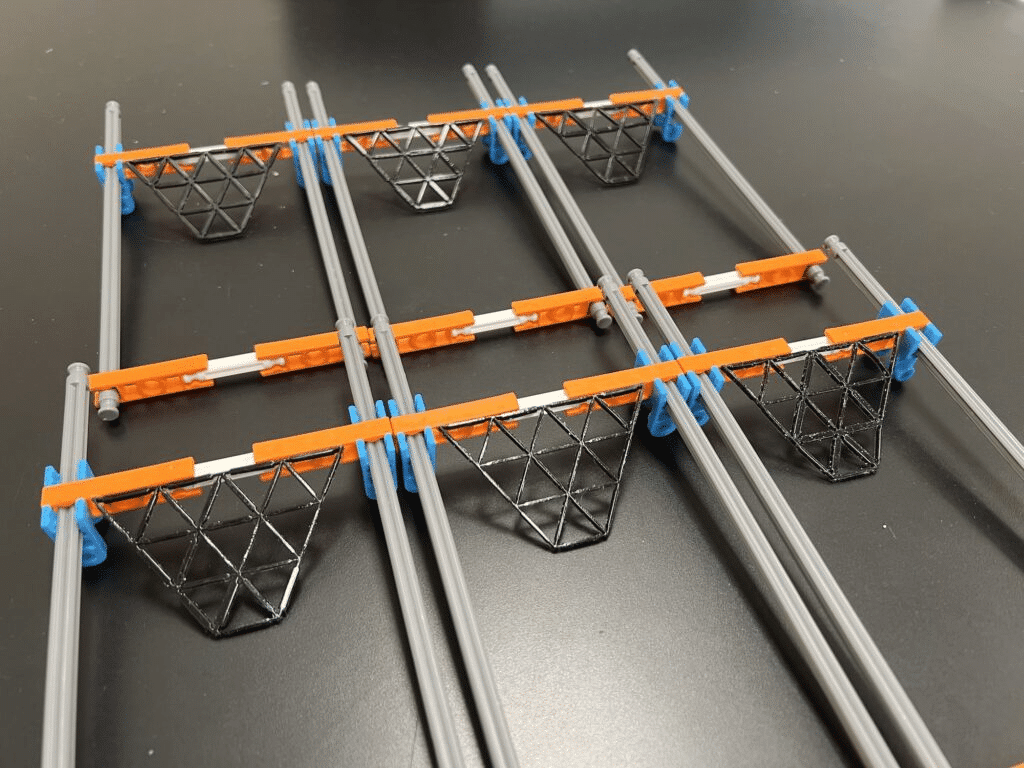
L’algoritmo sviluppato da Shuaifeng Li e Xiaoming Mao si basa sulla backpropagation, un approccio ampiamente utilizzato nelle reti neurali digitali per l’apprendimento. Applicando questa tecnica alle MNN, i ricercatori hanno dimostrato che è possibile addestrare materiali a rispondere in modo specifico a diversi stimoli. Per esempio, un reticolo è stato “formato” per distinguere tra specie di iris basandosi su caratteristiche come la dimensione delle foglie.
Le potenzialità delle MNN

Le reti neurali meccaniche offrono possibilità entusiasmanti per il futuro:
- Adattabilità aerospaziale: immaginate ali di aereo che si modellano automaticamente in base alle condizioni del vento, migliorando l’efficienza del volo.
- Strutture diagnostiche: materiali intelligenti potrebbero rilevare danni strutturali in edifici o infrastrutture critiche, avvisando tempestivamente gli operatori.
- Innovazioni nell’apprendimento: l’integrazione di onde sonore come input consentirebbe alle MNN di elaborare informazioni più complesse, aumentando significativamente la loro utilità.
Per il momento, l’adattamento dei materiali avviene manualmente, ma i progressi nella ricerca sui polimeri e sulle nanoparticelle potrebbero rendere le MNN pienamente autonome nel prossimo futuro.
Un ponte tra biologia e tecnologia
Un aspetto particolarmente intrigante di questa ricerca è il suo potenziale per comprendere i processi di apprendimento nei sistemi biologici. I ricercatori suggeriscono che l’algoritmo di backpropagation potrebbe fornire indizi su come i neuroni biologici elaborano e apprendono informazioni. Questo collegamento tra biologia e scienza dei materiali potrebbe aprire nuove strade nello studio delle reti neurali umane e animali.
La creazione di materiali che apprendono autonomamente rappresenta un cambio di paradigma. Le reti neurali meccaniche promettono di rivoluzionare settori chiave, dalla progettazione di macchine al miglioramento della sicurezza delle infrastrutture. Con il continuo avanzamento della ricerca, il confine tra il fisico e il digitale si assottiglia, dando vita a un futuro in cui i materiali non solo reagiscono, ma pensano e si adattano.
Robotica
RAVEN: il drone ispirato agli uccelli che salta per decollare
Tempo di lettura: 2 minuti. RAVEN: il drone ispirato agli uccelli dell’EPFL combina salti e volo per operazioni in ambienti complessi. Innovazione per soccorsi, ispezioni e consegne.

Il laboratorio di sistemi intelligenti dell’EPFL, guidato da Dario Floreano, ha sviluppato RAVEN, un drone innovativo ispirato agli uccelli per decollare senza bisogno di una pista. Con gambe robotiche multifunzionali, il dispositivo apre nuove possibilità per le operazioni in ambienti difficili, migliorando accesso, mobilità e autonomia.
Un design ispirato agli uccelli
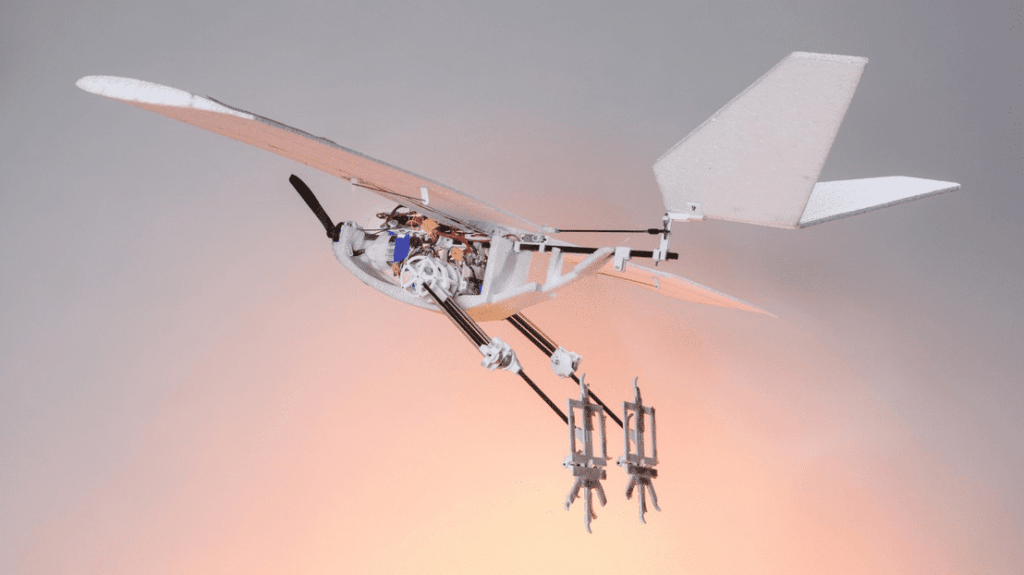
RAVEN, acronimo di Robotic Avian-inspired Vehicle for multiple ENvironments, imita le capacità degli uccelli di passare agilmente tra camminare, saltare e volare. Il progetto si ispira ai corvi e ai corvi imperiali osservati nel campus dell’EPFL. Le gambe robotiche, leggere e multifunzionali, combinano molle e motori che replicano i tendini e i muscoli aviani. Questa soluzione consente al drone di camminare, saltare fino a 26 cm di altezza e decollare con efficienza energetica senza bisogno di attrezzature aggiuntive.
Efficienza energetica e applicazioni pratiche
La ricerca ha dimostrato che il salto iniziale per il decollo ottimizza l’uso dell’energia cinetica e potenziale, risultando più efficiente rispetto ad altre modalità. RAVEN è stato progettato per operare in ambienti complessi, come zone di disastri o aree con terreni accidentati, dove droni tradizionali incontrano difficoltà.
Le sue capacità multimodali lo rendono ideale per missioni di soccorso, ispezioni in luoghi confinati o operazioni di consegna in spazi ristretti, eliminando la necessità di un’interazione umana diretta.
Collaborazioni scientifiche e sviluppi futuri
Il progetto è frutto di una collaborazione tra l’EPFL, il laboratorio di neuromeccanica dell’Università della California e il BioRobotics Lab. Gli studi non solo migliorano la comprensione del movimento multimodale negli animali volanti, ma puntano a perfezionare il controllo e il design delle gambe per adattarsi a una gamma più ampia di ambienti di atterraggio.
RAVEN rappresenta un passo avanti nella progettazione di droni agili e versatili. Con il suo approccio innovativo ispirato alla natura, promette di ridefinire il modo in cui i droni operano in contesti difficili, aprendo nuove possibilità per applicazioni pratiche e missioni critiche.




Windows, rischi Visual Studio Code, file MSC e kernel
Tempo di lettura: 3 minuti. Attacchi a Visual Studio Code e kernel di Windows: scopri come nuove minacce sfruttano estensioni...


HubPhish, targeting politico e vulnerabilità critiche
Tempo di lettura: 3 minuti. HubPhish, targeting politico e vulnerabilità critiche: analisi delle minacce e linee guida di sicurezza di...


Nvidia, SonicWall e Apache Struts: vulnerabilità critiche e soluzioni
Tempo di lettura: 3 minuti. Nvidia, SonicWall e Apache Struts: vulnerabilità critiche e le soluzioni consigliate per migliorare la sicurezza...


BadBox su IoT, Telegram e Viber: Germania e Russia rischiano
Tempo di lettura: < 1 minuto. Malware preinstallati su dispositivi IoT e sanzioni russe contro Telegram e Viber: scopri le...


PUMAKIT: analisi del RootKit malware Linux
Tempo di lettura: 3 minuti. PUMAKIT, il sofisticato rootkit per Linux, sfrutta tecniche avanzate di stealth e privilege escalation. Scopri...


Vulnerabilità Cleo: attacchi zero-day e rischi di sicurezza
Tempo di lettura: 2 minuti. Cleo, azienda leader nel software di trasferimento file gestito (MFT), è al centro di una...


Vulnerabilità cavi USB-C, Ivanti, WPForms e aggiornamenti Adobe
Tempo di lettura: 3 minuti. Vulnerabilità nei cavi USB-C, WPForms e Ivanti; aggiornamenti Adobe per Acrobat e Illustrator. Rischi e...


Microsoft Patch Tuesday dicembre 2024: sicurezza e funzionalità
Tempo di lettura: 2 minuti. Microsoft dicembre 2024: aggiornamenti Windows 11 e 10 con patch per vulnerabilità zero-day, nuove funzionalità...


Windows 11 e le novità di Copilot+: funzionalità avanzate e nuove esperienze
Tempo di lettura: 5 minuti. Microsoft amplia le funzionalità di Windows 11 con Copilot+ e Recall, mentre iFixit introduce pezzi...


Cybersicurezza: perchè c’è clamore sulle parole di Gratteri?
Tempo di lettura: 2 minuti. Nicola Gratteri critica il sistema IT italiano, paragonandolo agli acquedotti con il 45% di dati...


Qualcomm, LEGO e Arc Browser: Sicurezza sotto attacco e misure di protezione rafforzate
Tempo di lettura: 3 minuti. Qualcomm corregge una vulnerabilità zero-day, LEGO affronta una truffa in criptovalute e Arc Browser lancia...


Truffa “Il tuo partner ti tradisce”: chiedono di pagare per vedere le prove
Tempo di lettura: < 1 minuto. Una nuova truffa "Il tuo partner ti tradisce" chiede il pagamento per vedere prove...


Scam internazionale tramite Facebook e app: ERIAKOS e malware SMS stealer
Tempo di lettura: 4 minuti. Analisi delle campagne di scam ERIAKOS e del malware SMS Stealer che mirano gli utenti...


Meta banna 60.000 Yahoo Boys in Nigeria per sextortion
Tempo di lettura: 3 minuti. Meta combatte le truffe di estorsione finanziaria dalla Nigeria, rimuovendo migliaia di account e collaborando...


Idealong.com chiuso, ma attenti a marketideal.xyz e bol-it.com
Tempo di lettura: 2 minuti. Dopo aver svelato la truffa Idealong, abbiamo scoperto altri link che ospitano offerte di lavoro...


Idealong.com spilla soldi ed assolda lavoratori per recensioni false
Tempo di lettura: 4 minuti. Il metodo Idealong ha sostituito Mazarsiu e, dalle segnalazioni dei clienti, la truffa agisce su...
Truffa lavoro online: Mazarsiu sparito, attenti a idealong.com
Tempo di lettura: 2 minuti. Dopo il sito Mazarsiu, abbandonato dai criminali dopo le inchieste di Matrice Digitale, emerge un...


FBI legge Matrice Digitale? Avviso sulle truffe di lavoro Online
Tempo di lettura: 2 minuti. L'FBI segnala un aumento delle truffe lavoro da casa con pagamenti in criptovaluta, offrendo consigli...


Milano: operazione “Trust”, frodi informatiche e riciclaggio di criptovaluta
Tempo di lettura: 2 minuti. Scoperta un'organizzazione criminale transnazionale specializzata in frodi informatiche e riciclaggio di criptovaluta nell'operazione "Trust"


Truffa lavoro Online: analisi metodo Mazarsiu e consigli
Tempo di lettura: 4 minuti. Mazarsiu e Temunao sono solo due portali di arrivo della truffa di lavoro online che...


OnePlus Ace 5 Pro e Moto G05 Series: innovazione e affidabilità
Tempo di lettura: 3 minuti. OnePlus Ace 5 Pro vs Moto G05 Series: scopri i dettagli sui nuovi flagship e...


Microrobot magnetico nel trattamento dell’infertilità femminile
Tempo di lettura: 2 minuti. Microrobot magnetico per l’infertilità: una soluzione meno invasiva per trattare le ostruzioni delle tube di...
Vivo X200 Pro vs Google Pixel 9 Pro: quale flagship scegliere?
Tempo di lettura: 4 minuti. Vivo X200 Pro vs Google Pixel 9 Pro: confronto tra design, fotocamere, autonomia e prestazioni....


L’intelligenza artificiale: strumenti e trattamenti personalizzati in medicina
Tempo di lettura: 2 minuti. L’intelligenza artificiale trasforma la sanità con il Reinforcement Learning e le QuantNets. Strumenti innovativi per...


Galaxy S25: colori inediti, aggiornamenti per S22 e S21
Tempo di lettura: 3 minuti. Galaxy S25 con colori inediti e patch di dicembre per Galaxy S22 e S21: scopri...


Google Chrome Beta 132: aggiornamenti per iOS e Android
Tempo di lettura: < 1 minuto. Google Chrome Beta 132 per iOS e Android introduce miglioramenti alle prestazioni e stabilità....


iPhone 17 Pro: evoluzione del design e incertezze sul modulo fotocamera
Tempo di lettura: 4 minuti. iPhone 17: nuovi sensori fotografici, design raffinato e prestazioni migliorate con il chip A18 Bionic.


Galaxy S25, Z Fold 7 e Instagram Night Mode: novità Android
Tempo di lettura: 3 minuti. Samsung e Instagram introducono novità che migliorano l’esperienza utente, tra innovazioni nel design del Galaxy...


Apple e Samsung: altre Beta iOS 18.3 e One UI 7
Tempo di lettura: 4 minuti. Apple rilascia iOS 18.3 e macOS 15.3 Beta, mentre Samsung prepara il Galaxy S25 con...


L’intelligenza artificiale interpreta lingua dei segni in tempo reale
Tempo di lettura: 2 minuti. L’AI interpreta la lingua dei segni americana con il 98% di accuratezza. Lo studio FAU...
-

 Smartphone1 settimana ago
Smartphone1 settimana agoRealme GT 7 Pro vs Motorola Edge 50 Ultra: quale scegliere?
-

 Smartphone1 settimana ago
Smartphone1 settimana agoOnePlus 13 vs Google Pixel 9 Pro XL: scegliere o aspettare?
-

 Smartphone1 settimana ago
Smartphone1 settimana agoSamsung Galaxy Z Flip 7: il debutto dell’Exynos 2500
-

 Smartphone7 giorni ago
Smartphone7 giorni agoRedmi Note 14 Pro+ vs 13 Pro+: quale scegliere?
-
Sicurezza Informatica5 giorni ago
BadBox su IoT, Telegram e Viber: Germania e Russia rischiano
-

 Economia1 settimana ago
Economia1 settimana agoControversie e investimenti globali: Apple, Google e TikTok
-
Sicurezza Informatica10 ore ago
Nvidia, SonicWall e Apache Struts: vulnerabilità critiche e soluzioni
-
Sicurezza Informatica6 giorni ago
PUMAKIT: analisi del RootKit malware Linux