Robotica
Materiali intelligenti: il futuro delle reti neurali meccaniche
Le reti neurali meccaniche dell’Università del Michigan promettono materiali capaci di apprendere e adattarsi: innovazioni che cambiano il futuro della tecnologia.
L’idea che i materiali possano apprendere e risolvere problemi sembra provenire da un racconto di fantascienza, ma i ricercatori dell’Università del Michigan stanno trasformando questa visione in realtà. Grazie a un algoritmo di backpropagation adattato ai materiali fisici, le reti neurali meccaniche (MNN) possono ora apprendere e rispondere a stimoli in modo autonomo. Questo progresso apre nuove prospettive in campi come l’ingegneria aerospaziale, la diagnostica medica e il design intelligente.
Le reti neurali meccaniche: come funzionano
Le MNN sono strutture fisiche, come reticoli di gomma 3D, progettate per rispondere a input meccanici in modo intelligente. A differenza dei tradizionali sistemi digitali, queste reti utilizzano forze fisiche, come il peso applicato su un materiale, per elaborare informazioni. Il risultato è una deformazione visibile che rappresenta l’output.
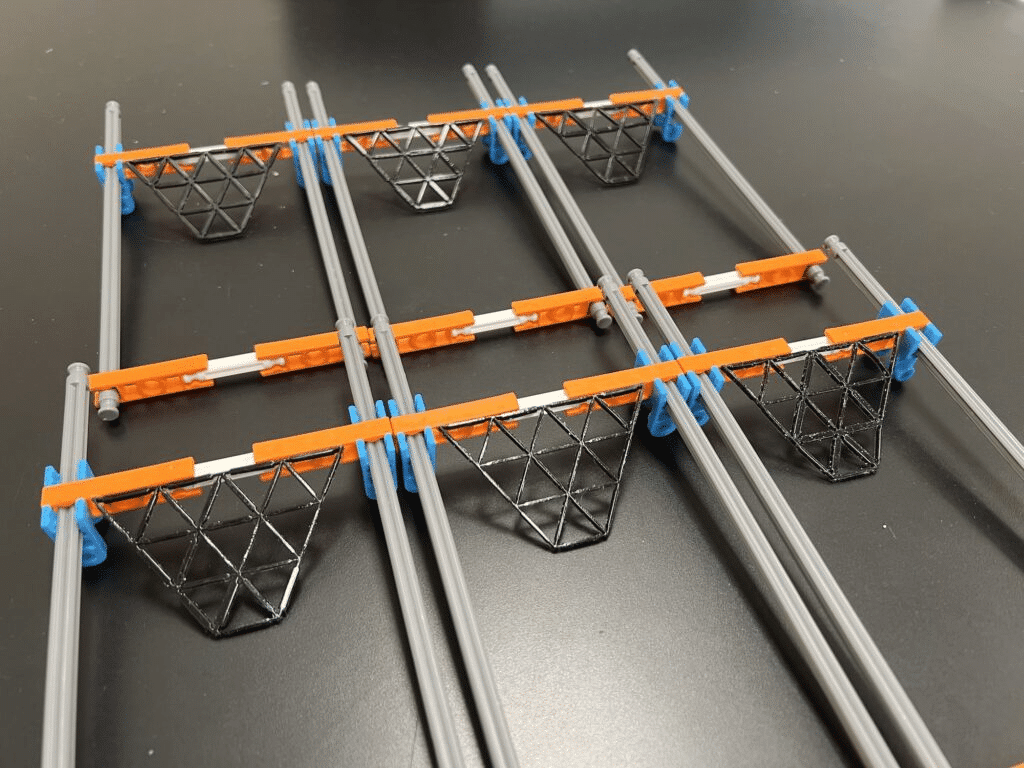
L’algoritmo sviluppato da Shuaifeng Li e Xiaoming Mao si basa sulla backpropagation, un approccio ampiamente utilizzato nelle reti neurali digitali per l’apprendimento. Applicando questa tecnica alle MNN, i ricercatori hanno dimostrato che è possibile addestrare materiali a rispondere in modo specifico a diversi stimoli. Per esempio, un reticolo è stato “formato” per distinguere tra specie di iris basandosi su caratteristiche come la dimensione delle foglie.
Le potenzialità delle MNN

Le reti neurali meccaniche offrono possibilità entusiasmanti per il futuro:
- Adattabilità aerospaziale: immaginate ali di aereo che si modellano automaticamente in base alle condizioni del vento, migliorando l’efficienza del volo.
- Strutture diagnostiche: materiali intelligenti potrebbero rilevare danni strutturali in edifici o infrastrutture critiche, avvisando tempestivamente gli operatori.
- Innovazioni nell’apprendimento: l’integrazione di onde sonore come input consentirebbe alle MNN di elaborare informazioni più complesse, aumentando significativamente la loro utilità.
Per il momento, l’adattamento dei materiali avviene manualmente, ma i progressi nella ricerca sui polimeri e sulle nanoparticelle potrebbero rendere le MNN pienamente autonome nel prossimo futuro.
Un ponte tra biologia e tecnologia
Un aspetto particolarmente intrigante di questa ricerca è il suo potenziale per comprendere i processi di apprendimento nei sistemi biologici. I ricercatori suggeriscono che l’algoritmo di backpropagation potrebbe fornire indizi su come i neuroni biologici elaborano e apprendono informazioni. Questo collegamento tra biologia e scienza dei materiali potrebbe aprire nuove strade nello studio delle reti neurali umane e animali.
La creazione di materiali che apprendono autonomamente rappresenta un cambio di paradigma. Le reti neurali meccaniche promettono di rivoluzionare settori chiave, dalla progettazione di macchine al miglioramento della sicurezza delle infrastrutture. Con il continuo avanzamento della ricerca, il confine tra il fisico e il digitale si assottiglia, dando vita a un futuro in cui i materiali non solo reagiscono, ma pensano e si adattano.











Robotica
RAVEN: il drone ispirato agli uccelli che salta per decollare
RAVEN: il drone ispirato agli uccelli dell’EPFL combina salti e volo per operazioni in ambienti complessi. Innovazione per soccorsi, ispezioni e consegne.

Il laboratorio di sistemi intelligenti dell’EPFL, guidato da Dario Floreano, ha sviluppato RAVEN, un drone innovativo ispirato agli uccelli per decollare senza bisogno di una pista. Con gambe robotiche multifunzionali, il dispositivo apre nuove possibilità per le operazioni in ambienti difficili, migliorando accesso, mobilità e autonomia.
Un design ispirato agli uccelli
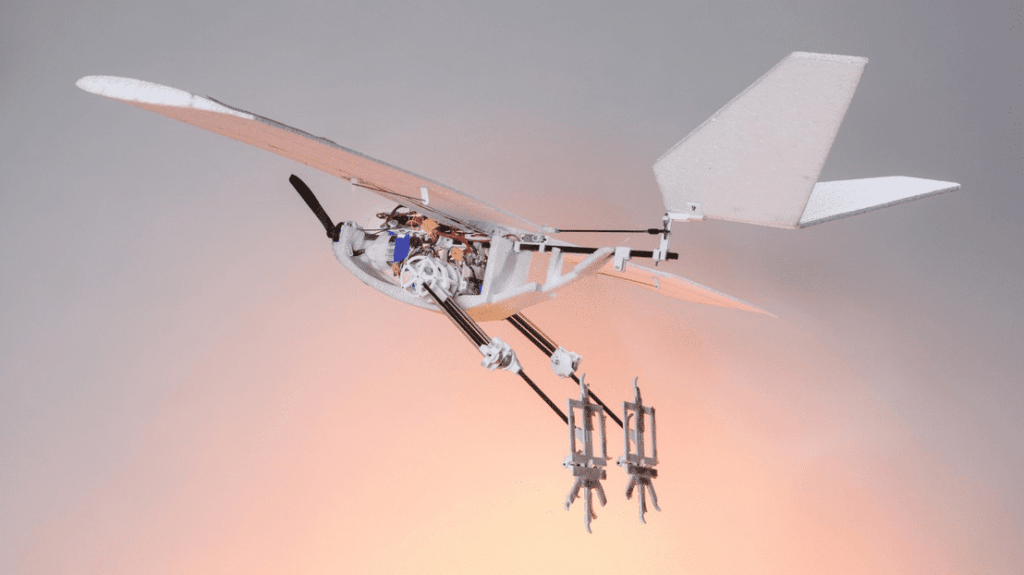
RAVEN, acronimo di Robotic Avian-inspired Vehicle for multiple ENvironments, imita le capacità degli uccelli di passare agilmente tra camminare, saltare e volare. Il progetto si ispira ai corvi e ai corvi imperiali osservati nel campus dell’EPFL. Le gambe robotiche, leggere e multifunzionali, combinano molle e motori che replicano i tendini e i muscoli aviani. Questa soluzione consente al drone di camminare, saltare fino a 26 cm di altezza e decollare con efficienza energetica senza bisogno di attrezzature aggiuntive.
Efficienza energetica e applicazioni pratiche
La ricerca ha dimostrato che il salto iniziale per il decollo ottimizza l’uso dell’energia cinetica e potenziale, risultando più efficiente rispetto ad altre modalità. RAVEN è stato progettato per operare in ambienti complessi, come zone di disastri o aree con terreni accidentati, dove droni tradizionali incontrano difficoltà.
Le sue capacità multimodali lo rendono ideale per missioni di soccorso, ispezioni in luoghi confinati o operazioni di consegna in spazi ristretti, eliminando la necessità di un’interazione umana diretta.
Collaborazioni scientifiche e sviluppi futuri
Il progetto è frutto di una collaborazione tra l’EPFL, il laboratorio di neuromeccanica dell’Università della California e il BioRobotics Lab. Gli studi non solo migliorano la comprensione del movimento multimodale negli animali volanti, ma puntano a perfezionare il controllo e il design delle gambe per adattarsi a una gamma più ampia di ambienti di atterraggio.
RAVEN rappresenta un passo avanti nella progettazione di droni agili e versatili. Con il suo approccio innovativo ispirato alla natura, promette di ridefinire il modo in cui i droni operano in contesti difficili, aprendo nuove possibilità per applicazioni pratiche e missioni critiche.
Robotica
Cornell sviluppa il robot più piccolo al mondo per misurazioni microscopiche
Il robot più piccolo al mondo, creato da Cornell, combina robotica e ottica per misurazioni microscopiche e imaging a scala nanometrica.

Un team di ricercatori della Cornell University ha creato il più piccolo robot deambulante mai realizzato, progettato per interagire con onde di luce visibile e svolgere compiti di imaging e misurazione a scala microscopica. Questi microrobot, che misurano tra i 2 e i 5 micron, rappresentano un’innovazione unica, combinando robotica e ottica per esplorare strutture biologiche e materiali con un livello di precisione senza precedenti.
Robot diffrattivi: un nuovo paradigma
I robot sviluppati dai ricercatori di Cornell utilizzano elementi diffrattivi che manipolano la luce a livello sub-diffrattivo, permettendo loro di funzionare come estensioni microscopiche di una lente tradizionale. Questi robot non solo camminano su superfici solide grazie a un movimento controllato magneticamente, ma possono anche “nuotare” in fluidi con un meccanismo simile al movimento del verme inch-worm.
Il design del robot integra nanomagneti con forme differenti, lunghi e sottili o corti e compatti, per controllare con precisione i movimenti attraverso campi magnetici. Questo approccio consente al robot di piegarsi e muoversi senza bisogno di alimentazione diretta, riducendo le dimensioni complessive e aumentando l’efficienza.
Secondo Itai Cohen, uno degli autori principali dello studio, i robot possono svolgere compiti come il tuning della luce, la messa a fuoco e il superamento della risoluzione ottica convenzionale. Inoltre, il movimento controllato consente ai robot di misurare forze microscopiche, una funzione cruciale per esplorare strutture come il DNA e altre molecole complesse.
Applicazioni e prospettive future
Questi microrobot potrebbero rivoluzionare numerosi campi, dalla ricerca di base alla medicina clinica. Immaginare uno sciame di robot che eseguono simultaneamente microscopia a super-risoluzione e misurazioni fisiche su campioni biologici apre nuove possibilità per l’analisi dettagliata dei tessuti e la manipolazione di materiali a scala nanometrica.
Francesco Monticone, coautore dello studio, ritiene che siamo solo all’inizio di una nuova era in cui robotica e ottica microscopica si combinano per creare strumenti scientifici avanzati. Grazie alla loro versatilità, questi robot potrebbero essere utilizzati per esplorare campioni biologici complessi o come sensori per misurazioni in tempo reale in ambienti difficili.
I microrobot di Cornell rappresentano una pietra miliare nella miniaturizzazione della robotica, dimostrando il potenziale di integrare ingegneria ottica e meccanica a livelli microscopici. Questi strumenti potrebbero trasformare la ricerca scientifica e le applicazioni cliniche, permettendo una comprensione più profonda del mondo microscopico.
Robotica
Navigazione robotica con le reti neurali a impulsi
QUT sviluppa un sistema di navigazione robotica ispirato al cervello animale. Efficienza energetica e precisione grazie alle reti neurali a impulsi.

Un team di ricercatori della Queensland University of Technology (QUT) ha sviluppato un innovativo algoritmo di navigazione per robot, ispirato al funzionamento del cervello degli insetti e degli animali. Utilizzando reti neurali a impulsi (Spiking Neural Networks, SNNs), il sistema offre una maggiore efficienza energetica e una navigazione più precisa, rappresentando un passo avanti per i robot autonomi in ambienti complessi.
Reti neurali a impulsi per la navigazione robotica
Le reti neurali a impulsi imitano il modo in cui i neuroni biologici comunicano tramite segnali discreti. Questa tecnologia è particolarmente adatta per hardware neuromorfico, progettato per replicare i sistemi neurali biologici. Rispetto ai tradizionali sistemi di intelligenza artificiale, le SNNs riducono significativamente il consumo energetico e accelerano i tempi di elaborazione.

Secondo la ricercatrice postdoc Somayeh Hussaini, questo approccio consente di superare le limitazioni dei moderni robot, che spesso faticano a operare in ambienti sconosciuti e dinamici. Le SNNs si sono dimostrate utili per riconoscere luoghi specifici attraverso sequenze di immagini, migliorando del 41% l’accuratezza del riconoscimento rispetto a metodi basati su immagini singole.
Applicazioni pratiche e potenziale futuro
Il sistema è stato testato con successo su un robot con risorse limitate, dimostrando la sua praticità per scenari reali in cui l’efficienza energetica è essenziale. Tra le potenziali applicazioni vi sono l’esplorazione spaziale e le operazioni di soccorso, dove l’ottimizzazione dei consumi e la rapidità di risposta sono fondamentali.
Inoltre, la combinazione di moduli di rete neurale in un ensemble scalabile permette al robot di adattarsi ai cambiamenti ambientali, come variazioni stagionali o meteorologiche, migliorando la robustezza del sistema. Secondo il professor Michael Milford, questa tecnologia potrebbe competere con i sistemi convenzionali e, in futuro, persino superarli in termini di efficienza e affidabilità.
Il lavoro del team QUT rappresenta un significativo progresso nel campo della robotica autonoma, aprendo la strada a sistemi di navigazione più affidabili ed efficienti dal punto di vista energetico. Grazie all’ispirazione biologica e all’uso delle reti neurali a impulsi, il futuro della robotica in ambienti complessi sembra sempre più promettente.




Vulnerabilità Cleo: attacchi zero-day e rischi di sicurezza
Cleo, azienda leader nel software di trasferimento file gestito (MFT), è al centro di una vulnerabilità critica (CVE-2024-50623) che ha...


Vulnerabilità cavi USB-C, Ivanti, WPForms e aggiornamenti Adobe
Vulnerabilità nei cavi USB-C, WPForms e Ivanti; aggiornamenti Adobe per Acrobat e Illustrator. Rischi e soluzioni per proteggere dati e...


Microsoft Patch Tuesday dicembre 2024: sicurezza e funzionalità
Microsoft dicembre 2024: aggiornamenti Windows 11 e 10 con patch per vulnerabilità zero-day, nuove funzionalità e correzioni critiche per hardware.


Windows 11 e le novità di Copilot+: funzionalità avanzate e nuove esperienze
Microsoft amplia le funzionalità di Windows 11 con Copilot+ e Recall, mentre iFixit introduce pezzi di ricambio Xbox per promuovere...


Cybersicurezza: perchè c’è clamore sulle parole di Gratteri?
Nicola Gratteri critica il sistema IT italiano, paragonandolo agli acquedotti con il 45% di dati persi e denuncia uno scenario...


CISA: avvisi su ICS e tecnologie verificabili e aggiornamenti Cisco
CISA pubblica avvisi ICS, linee guida per tecnologie sicure e aggiornamenti Cisco NX-OS per affrontare vulnerabilità e proteggere sistemi critici.


Frodi e disinformazione con intelligenza artificiale: minacce emergenti
Frodi AI-driven e campagne di disinformazione evidenziano l'impatto dell'intelligenza artificiale su sicurezza e fiducia globale.


Horns & Hooves, phishing con documenti corrotti e SmokeLoader
Horns & Hooves, phishing con documenti corrotti e SmokeLoader: tre minacce informatiche avanzate che mettono a rischio utenti e aziende.


Vulnerabilità e aggiornamenti su Windows 11, Cisco e Solana
Negli ultimi giorni, l’evoluzione della tecnologia ha evidenziato nuove opportunità e problematiche per gli utenti di Windows 11, i sistemi...


Minaccia Snowblind e le falle critiche nei router I-O DATA
Snowblind e le vulnerabilità dei router I-O DATA evidenziano rischi emergenti nella cybersecurity. Scopri come proteggere reti e infrastrutture IT.


Qualcomm, LEGO e Arc Browser: Sicurezza sotto attacco e misure di protezione rafforzate
Qualcomm corregge una vulnerabilità zero-day, LEGO affronta una truffa in criptovalute e Arc Browser lancia un programma di bug bounty...


Truffa “Il tuo partner ti tradisce”: chiedono di pagare per vedere le prove
Una nuova truffa "Il tuo partner ti tradisce" chiede il pagamento per vedere prove false. Scopri come proteggerti dalle frodi...


Scam internazionale tramite Facebook e app: ERIAKOS e malware SMS stealer
Analisi delle campagne di scam ERIAKOS e del malware SMS Stealer che mirano gli utenti di Facebook e i dispositivi...


Meta banna 60.000 Yahoo Boys in Nigeria per sextortion
Meta combatte le truffe di estorsione finanziaria dalla Nigeria, rimuovendo migliaia di account e collaborando con le forze dell'ordine.


Idealong.com chiuso, ma attenti a marketideal.xyz e bol-it.com
Dopo aver svelato la truffa Idealong, abbiamo scoperto altri link che ospitano offerte di lavoro fasulle


Idealong.com spilla soldi ed assolda lavoratori per recensioni false
Il metodo Idealong ha sostituito Mazarsiu e, dalle segnalazioni dei clienti, la truffa agisce su due piani: economico e recensioni...
Truffa lavoro online: Mazarsiu sparito, attenti a idealong.com
Dopo il sito Mazarsiu, abbandonato dai criminali dopo le inchieste di Matrice Digitale, emerge un clone della truffa: idealong.com


FBI legge Matrice Digitale? Avviso sulle truffe di lavoro Online
L'FBI segnala un aumento delle truffe lavoro da casa con pagamenti in criptovaluta, offrendo consigli su come proteggersi e segnalare...


Milano: operazione “Trust”, frodi informatiche e riciclaggio di criptovaluta
Scoperta un'organizzazione criminale transnazionale specializzata in frodi informatiche e riciclaggio di criptovaluta nell'operazione "Trust"


Truffa lavoro Online: analisi metodo Mazarsiu e consigli
Mazarsiu e Temunao sono solo due portali di arrivo della truffa di lavoro online che sta rubando soldi agli italiani


Linux Mint 22.1 “Xia” e l’evoluzione delle licenze open source per l’AI
Linux Mint 22.1 “Xia” introduce nuove funzionalità, mentre il dibattito sul futuro delle licenze open source nell’AI ridefinisce il panorama...


“Black-Box Forgetting”: AI più efficiente e rispettosa della privacy
Il metodo Black-Box Forgetting consente ai modelli AI di dimenticare informazioni non necessarie, migliorando efficienza e privacy.


Realme GT 7 Pro vs Realme GT 6: quale scegliere?
Scopri le differenze tra Realme GT 7 Pro e GT 6: chipset, display, fotocamere e batteria a confronto per scegliere...


Apple e Microsoft: novità iPhone e integrazione con Windows
Apple e Microsoft rinnovano l’integrazione tecnologica: design innovativi, connettività migliorata e AI avanzata con Siri e ChatGPT.


Galaxy S25 Ultra, accessori magnetici e aggiornamenti S24
Scopri le novità Samsung: design innovativo per il Galaxy S25 Ultra, accessori magnetici Qi2 e aggiornamenti software stabili per la...


Materiali intelligenti: il futuro delle reti neurali meccaniche
Le reti neurali meccaniche dell’Università del Michigan promettono materiali capaci di apprendere e adattarsi: innovazioni che cambiano il futuro della...


MovieNet: l’AI che “pensa” come il cervello
Gli scienziati del Scripps Research hanno sviluppato MovieNet, un modello di intelligenza artificiale ispirato al cervello umano. Questa tecnologia, in...


Redmi Note 14 5G vs Realme 13 5G: confronto dettagliato
Confronto Redmi Note 14 5G e Realme 13 5G: display AMOLED, fotocamere avanzate e batteria più grande per il Redmi,...


Redmi Note 14 Pro+ vs 13 Pro+: quale scegliere?
Confronto Redmi Note 14 Pro+ 5G e Note 13 Pro+ 5G: design premium, fotocamera avanzata e batteria maggiore: quale smartphone...
Innovazioni Apple: M4 si al Mac Mini, no alla versione extreme
Apple innova con Vision Pro, Mac Mini M4 e Apple Intelligence, segnando progressi in AR, cloud computing e AI. Espansione...
-

 Smartphone6 giorni ago
Smartphone6 giorni agoGalaxy S25 Ultra contro S24 Ultra: quale scegliere?
-

 Smartphone3 giorni ago
Smartphone3 giorni agoRealme GT 7 Pro vs Motorola Edge 50 Ultra: quale scegliere?
-

 Smartphone2 giorni ago
Smartphone2 giorni agoOnePlus 13 vs Google Pixel 9 Pro XL: scegliere o aspettare?
-

 OSINT5 giorni ago
OSINT5 giorni agoMetaverso Politico: Meloni perde terreno, ma non c’è opposizione
-

 Smartphone1 giorno ago
Smartphone1 giorno agoSamsung Galaxy Z Flip 7: il debutto dell’Exynos 2500
-
Smartphone13 ore ago
Redmi Note 14 Pro+ vs 13 Pro+: quale scegliere?
-

 Tech1 settimana ago
Tech1 settimana agoOnePlus: novità su smartphone, tablet, smartwatch e accessori
-

 Tech5 giorni ago
Tech5 giorni agoSamsung Galaxy S25, Z Flip FE e Smart Glasses nel 2025