
Robotica
ProSIP: robot apprendono a pulire superfici complesse tramite dimostrazioni umane
ProSIP consente ai robot di apprendere la pulizia di superfici 3D complesse tramite dimostrazioni umane, adattandosi a forme variabili.
L’automazione di compiti complessi che richiedono interazioni precise con superfici tridimensionali rappresenta una sfida significativa per la robotica. I ricercatori della TU Wien hanno sviluppato il framework ProSIP (Probabilistic Surface Interaction Primitives), progettato per consentire ai robot di apprendere operazioni delicate come la pulizia dei bordi di lavandini da dimostrazioni umane. Questo approccio permette di adattare le traiettorie e i movimenti del robot per gestire diverse forme geometriche e variazioni, ottimizzando le capacità di pulizia automatica.
Apprendimento del robot tramite dimostrazione
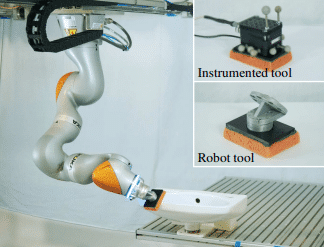
Il framework ProSIP si basa sul concetto di apprendimento da dimostrazione (Learning from Demonstration, LfD), in cui i robot apprendono compiti complessi osservando e replicando azioni umane. In un contesto come la pulizia dei lavandini, ProSIP registra i movimenti eseguiti dall’operatore umano utilizzando uno strumento dotato di sensori. Grazie a questo approccio, i dati di movimento vengono acquisiti e analizzati, creando un modello probabilistico che descrive come lo strumento si muove lungo il contorno del lavandino.
Il sistema è progettato per essere invariante al tempo, il che significa che non dipende dalla velocità o dalla durata della dimostrazione. Questo permette al robot di adattare i movimenti a seconda della situazione, mantenendo una precisione costante lungo tutto il percorso di pulizia, anche quando le superfici variano in forma o curvatura.
Tecnologie e implementazione del framework ProSIP
ProSIP integra diverse tecnologie per ottimizzare l’interazione del robot con superfici complesse:
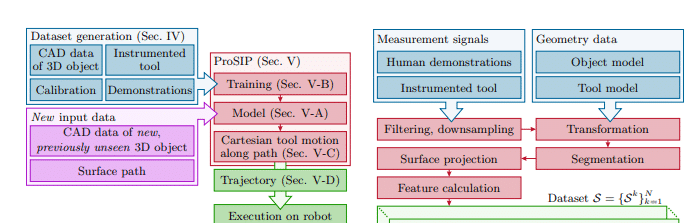
- Proiezione su superfici 3D: il framework considera la geometria della superficie e proietta i movimenti dello strumento sul percorso previsto lungo la superficie tridimensionale. Questa caratteristica consente a ProSIP di gestire superfici curve o con angoli, adattando i movimenti del robot in modo da seguire i contorni.
- Utilizzo di dati CAD: per ogni oggetto da pulire, i modelli CAD ad alta risoluzione sono utilizzati come riferimento, assicurando che il robot possa identificare accuratamente le superfici e le curvature su cui operare.
- Movimento indipendente dalla piattaforma: il framework è compatibile con qualsiasi robot dotato di controllore cartesiano, rendendo ProSIP una soluzione flessibile e applicabile in diversi contesti robotici.
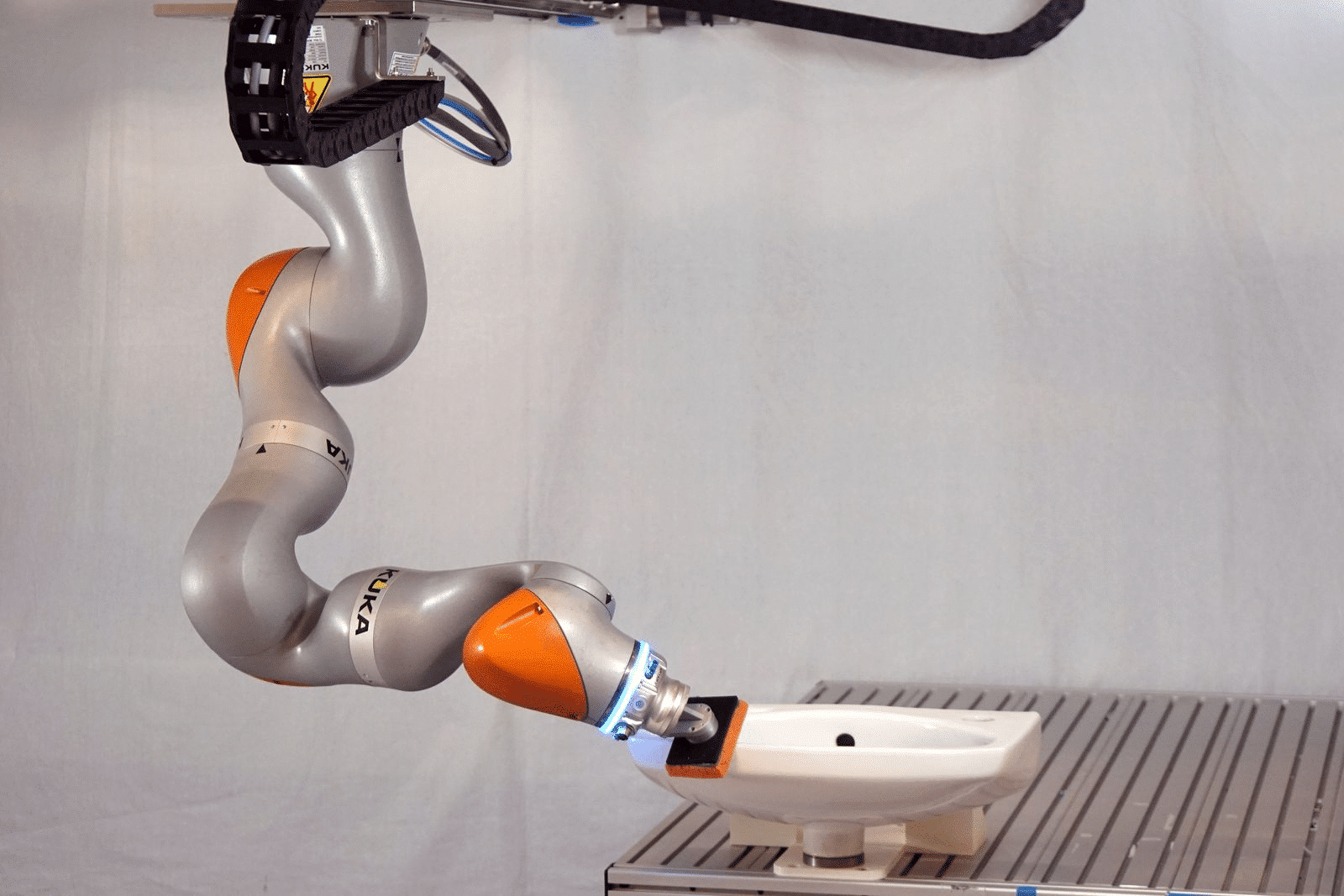
Il robot impiegato per i test utilizza una piattaforma con 9 gradi di libertà, composta da un braccio robotico KUKA e due assi lineari ortogonali che consentono la regolazione della base del robot. Grazie a questa configurazione, il robot può raggiungere superfici irregolari e manovrare lo strumento di pulizia in modo preciso.
Esecuzione e risultati sperimentali
Il team di TU Wien ha testato il framework ProSIP su un lavandino standard, dimostrando la capacità del robot di pulire diverse aree, inclusi i bordi e le superfici curve. I test comprendono sia simulazioni che prove sperimentali in cui il robot ha eseguito movimenti di pulizia lungo i bordi del lavandino, replicando i movimenti registrati tramite dimostrazione. In simulazione, la precisione è stata verificata tramite il confronto dei punti di contatto tra lo strumento e il lavandino, evidenziando un’adesione ottimale alla superficie.
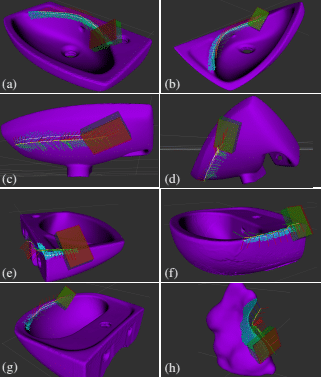
ProSIP ha dimostrato una notevole capacità di generalizzazione, riuscendo ad adattarsi a forme diverse e persino a superfici significativamente distorte rispetto ai modelli originali. L’adattamento ai diversi contorni e alle variazioni geometriche mostra come il framework riesca a rispondere alle esigenze di pulizia su oggetti nuovi e complessi.
Implicazioni future per la robotica e l’apprendimento delle superfici
Il successo di ProSIP nel contesto della pulizia di superfici 3D apre la strada a numerose applicazioni in cui i robot devono interagire con superfici delicate e complesse, come la lucidatura, la levigatura o persino la manutenzione domestica. In futuro, i ricercatori della TU Wien prevedono di espandere il framework per includere modelli gerarchici che possano riconoscere diverse geometrie, inclusi piani e angoli, integrando anche segnali di forza e coppia per un’interazione più precisa.